In industrial processes, maintaining process variables such as temperature, pressure, and flow rate at certain specified values is called "control (adjustment)," and a system that automatically and continuously maintains this state is called an automatic control system.
feedback control
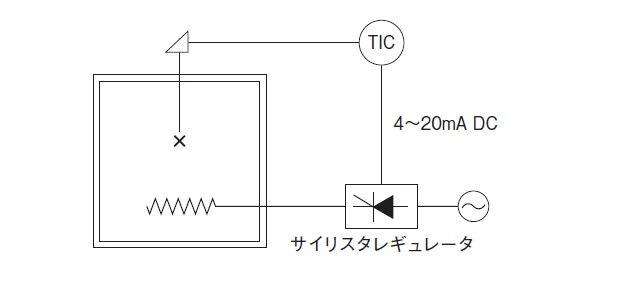
control The purpose of control is to match the measured value to the target value, and the automatic control automatically combines the detection part (e.g., temperature sensor), the regulation part (controller), and the operation part (e.g., electromagnetic switchgear). This movement is depicted in the block diagram below.
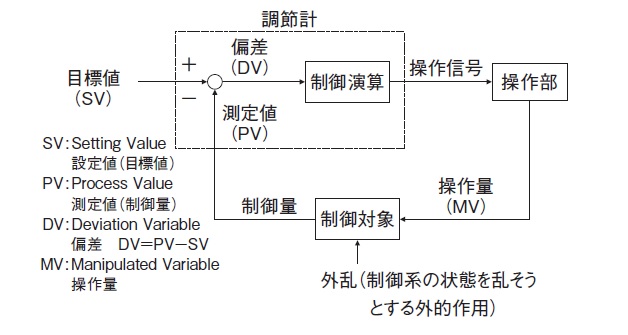
A loop is created in which the results of operation applied to control object are sent back to the adjustment section, and the set value is repeatedly matched to the target value.
This type of loop is called feedback loop, and control using feedback loop is called feedback control. feedback control is the basis of control and is used in many types of control.
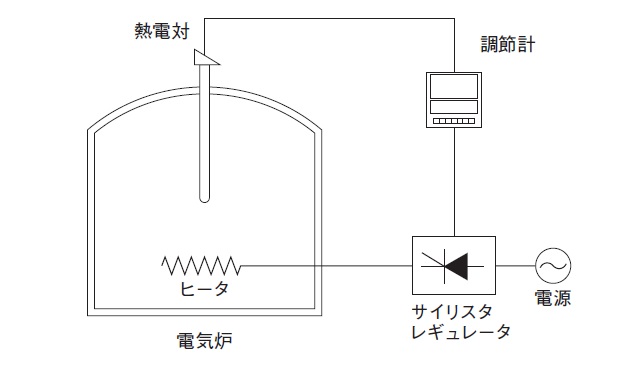
An example of a basic feedback control configuration, the temperature control loop of an electric furnace, is shown below.
On/off operation
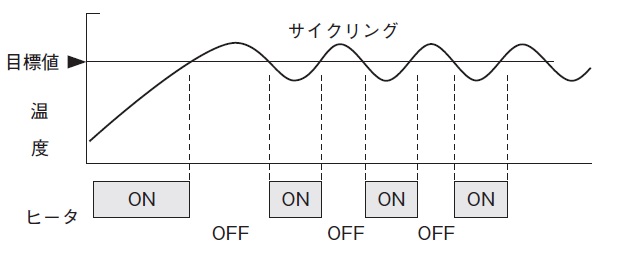
The temperature is control by turning the switch at operation device on and off with a signal from the controller to send electricity intermittently to the heater. This type of control is called on-off control.
When control temperature by turning the power on and off, the temperature may vibration around the target value due to a delayed response. This type of periodic change is called cycling.
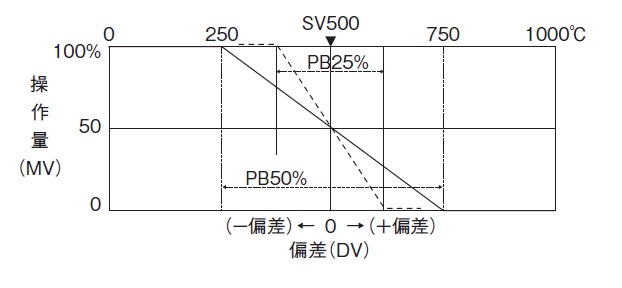
Proportional action (P action)
On the on-off control, the control result cycled due to a delay in response in the feedback loop. Therefore, it is a method of control that outputs the amount of operation proportional to the control deviation by adjusting the operation amount from before the target value so that stable control without cycling can be achieved. operation The range of change in the amount of control required to change the amount by 0~100% is called the proportionality band (%).
In general, when the control deviation is 0, the operation output is adjusted to 50%.
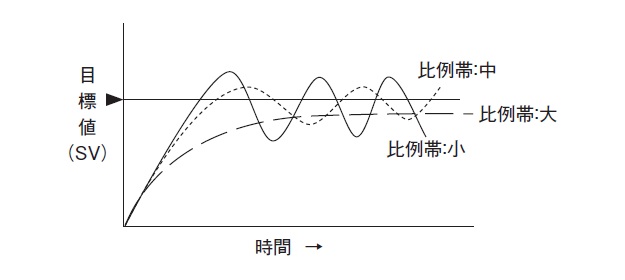
control Even if the deviation is constant, the operation output is different depending on the size of the proportional band, and the smaller the proportionality band, the larger the output change, and when the proportionality band is 0%, it is equal to the two-position operation.
PID control
In proportional action, control deviation and operation output are set uniquely, so generally the set temperature and equilibrium temperature do not match, resulting in a deviation. This deviation is called offset. In the same process, the smaller the proportional band, the smaller offset.
- Integral action (I action)
Integral action is not used stand alone, but in combination with proportional action to eliminate offset that is inevitable with proportional action.
The integral action continues to increase (or decrease) operation output as long as there is a control deviation.
Integral time (TI) is the time required for the output to change by the integral action by the same amount as that changed by the proportional action when a certain control deviation occurs and continues.

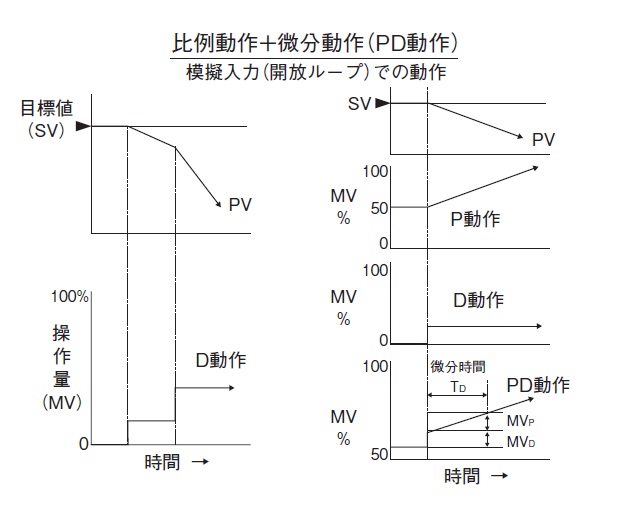
- Differential action (D action)
Derivative action is also called predictive action, and the operation output is determined by the rate of change of control variable (derivative value). Used in combination with proportional action, when a measured value changes due to disturbance or other reason, the change is predicted and the output is increased (or decreased) to suppress the change.
The differential time (TD) is the time required for the proportional action to change the output by the same amount as that changed by the differential action in response to a ramp deviation.
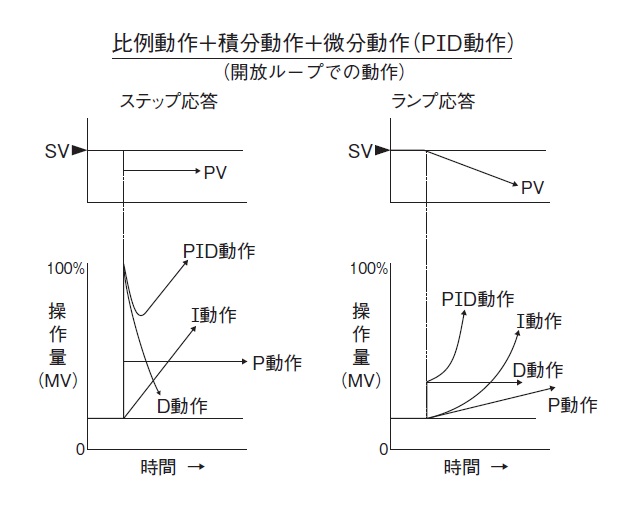
- PID control
The output of PID action, which combines proportional action, integral action, and derivative action, is the sum of the outputs of each action.
PID controller control output explanation
The PID controller offers four different output formats depending on the type of operation terminal connected.
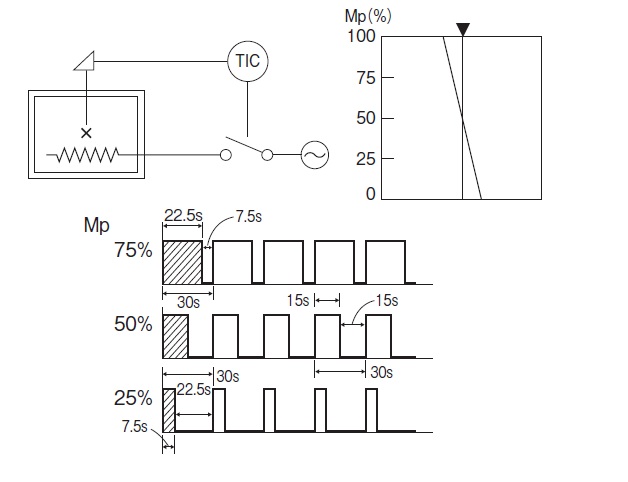
- On-off pulse type controller (time proportional)
- SSR drive pulse type controller
Time proportionality is used to drive on-off type operation elements such as triacs, electromagnetic switches (relays), and solenoid valves, and computation output is converted so that it is proportional to the Ton/Toff ratio within a certain period.
The output signal of SSR drive pulse type controller is a pulse voltage signal (12V, 24V DC). Everything else is the same as the on-off pulse type controller.
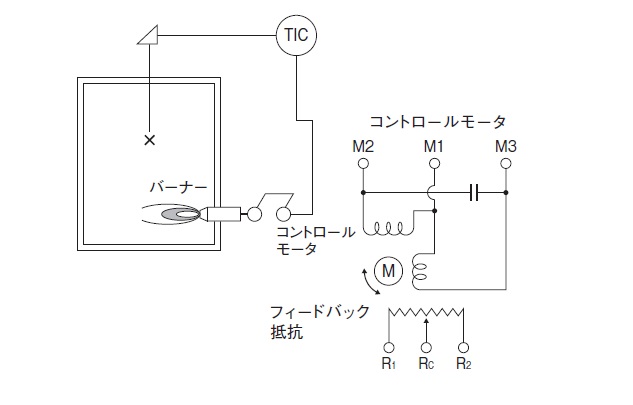
- on-off servo controller
on-off servo type drives control motors, motorized valves, and other operation elements, and is equipped with a motor terminal for forward/reverse rotation so that operation element position is proportional to computation output, and feedback resistance terminal for position detection.
- current output regulator
current output type is used to drive operation devices such as thyristor regulators and diaphragm valves, and is also known as the continuous output type and is the standard type.